When leaping geckos crash head-first into vertical surfaces such as tree trunks, they’re able to hang onto that surface instead of bouncing off and falling to the ground. Scientists have discovered what allows them to do so, and copied the capability in a small robot.
The new study was led by Prof. Robert Full from the University of California-Berkeley, Dr. Ardian Jusufi from Germany’s Max Planck Research School for Intelligent Systems, Dr. Robert Siddall from Britain’s University of Surrey, and Dr. Gregory Byrnes from Siena College in New York.
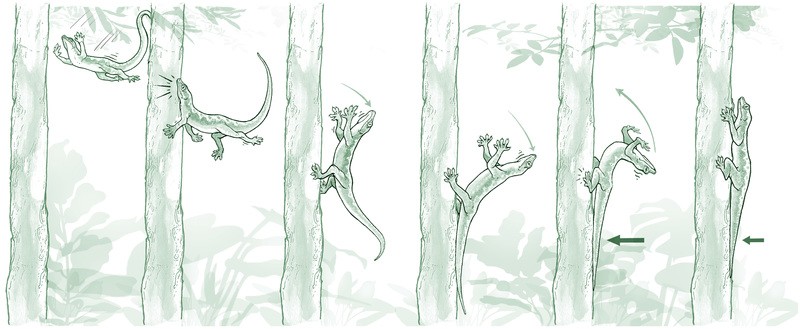
Over the course of several field seasons in Singapore, Jusufi shot and analyzed numerous slow-motion videos of Asian flat-tailed house geckos (Hemidactylus platyurus) leaping/gliding from tree trunk to tree trunk. Although the animals tried to avoid making awkward head-first landings, when they did end up doing so, they were travelling at speeds of around 6 meters (20 ft) per second.
While their head, shoulders and front legs rebounded back off the tree, the lizards were able to grab the trunk with their grippy hind feet. This provided them with leverage to press their long tail down onto the tree, allowing the appendage to act as a brace that kept them from flipping over backwards and falling to the jungle floor.
Felipe Vargas
That bracing mechanism was subsequently reproduced in a 3D-printed soft-bodied robot designed by the scientists. The device had four Velcro-covered feet, a tail, and an internal motorized tendon that was automatically triggered to press the tail down whenever the front legs made hard contact with a surface.
When that robot was catapulted onto a felt-covered wall, it was able to cling without falling off backwards 55 percent of the time. While that might not sound fantastic, its success rate dropped to just 15 percent when its tail was removed. This falls in line with what was observed in the wild geckos – tailed individuals had an 87-percent success rate, but those that had naturally lost their tails to predators or in other mishaps were almost entirely unsuccessful.

Wolfram Scheible
“With the robot, we were able to measure something we could not with geckos in the field,” says Jusufi. “The wall reaction forces at the impact upon landing confirmed that the tail is an essential part facilitating the landing in subcritical glides. Our soft robotic lander not only helps to make an impact in another field, but it can also help improve robot locomotion by increasing robustness and simplifying control.”
A paper on the research was recently published in the journal Communications Biology. The robot can be seen in action, in the following video.
Tails stabilize Landing of gliding Geckos crashing Head-First Into Tree Trunks
Sources: University of California-Berkeley, Max Planck Research School for Intelligent Systems via EurekAlert
Source of Article
