If a foraging ant encounters a gap too wide for it to cross on its own, the insect will sometimes signal other ants to form a bridge of their linked bodies. Such behaviour has now been copied in a small four-legged robot, that may someday inspire better search-and-rescue bots.
Quadruped robots definitely have some advantages over their wheeled counterparts, including the fact that they can step up and over obstacles while traversing rough terrain. It is therefore envisioned that collaborative “swarms” of such robots could ultimately find use in applications such as searching for survivors at disaster sites.
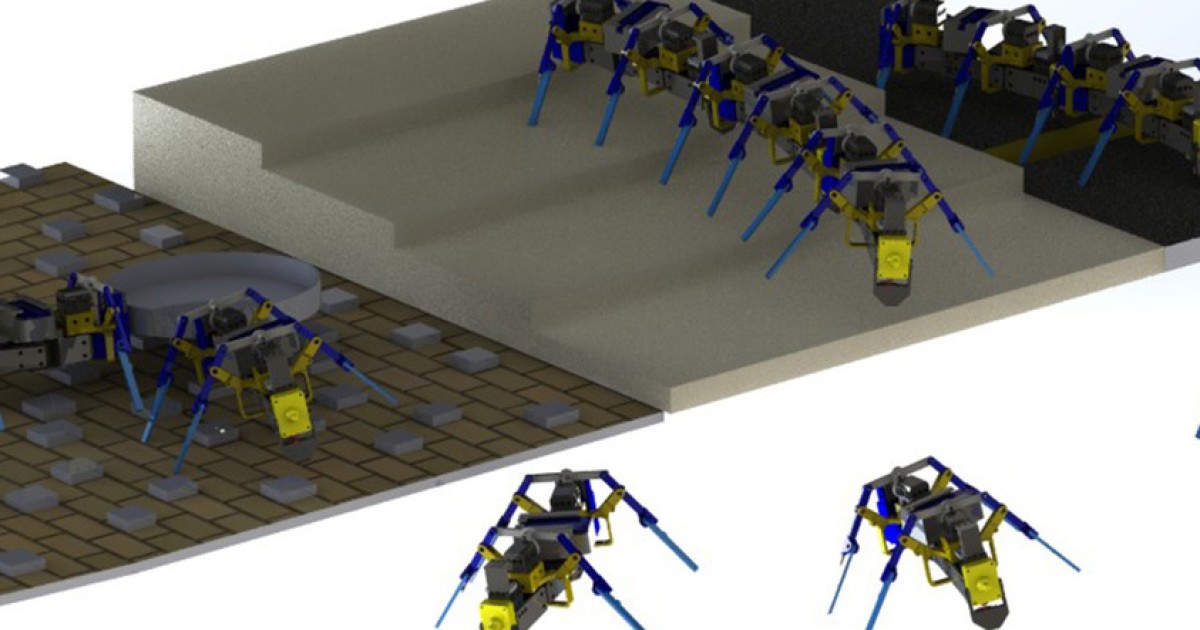
Even legged robots, however, can still be stopped by deep chasms or obstacles that are too steep to climb. With these limitations in mind, the University of Notre Dame’s Asst. Prof. Yasemin Ozkan-Aydin built a batch of 3D-printed four-legged robots that can work together to bypass such challenges.
Each one measures 15 to 20 cm (6 to 8 inches) in length, and incorporates a lithium-polymer battery, a microprocessor, a front-mounted light sensor, plus one magnetic touch sensor in front and another in the rear. When the bot gets stuck by test items such as wooden blocks glued to particle board, it wirelessly sends a signal to other robots in its vicinity.
Once those robots arrive, they use their magnetic touch sensors to establish their orientation relative to one another, and to link their bodies together in a chain. In this way, they can form a gap-crossing bridge or an obstacle-climbing train, plus they can even work together to carry objects too large or heavy for an individual bot to manage.
Ozkan-Aydin is now working on improving the sensitivity, collaborative capabilities and battery power of her swarm robotics system. Along with its use in search-and-rescue operations, it might ultimately find use in applications such as space exploration, environmental monitoring, or for studying the collective dynamics of insects like ants and termites.
A paper on the research was recently published in the journal Science Robotics.
Source: University of Notre Dame
Source of Article