Boston Dynamics continues to astound us with progress on Atlas, its humanoid robot. In a new video, Atlas goes to work on a construction site, showing off some fascinating new abilities, spiced up with some acrobatics that’d get most of us sacked.
Over the last few years, we’ve seen Atlas develop a pretty incredible feel for its own body. Ten years old this year, this 1.5-meter-tall (5-ft), 89-kg (196-lb) android, with 28 hydraulically-actuated joints, has developed impressive speed, dynamic balance, and a certain confidence and fluidity of motion – not to mention some athletic capabilities most of us would struggle to match. Now, the Atlas team is turning its work in a more practical direction.
“We’re not just thinking about how to make the robot move dynamically through its environment like we did in parkour and dance,” says Atlas team lead Scott Kuindersma. “Now we’re starting to put Atlas to work, and think about how the robot should be able to perceive and manipulate objects in its environment.”
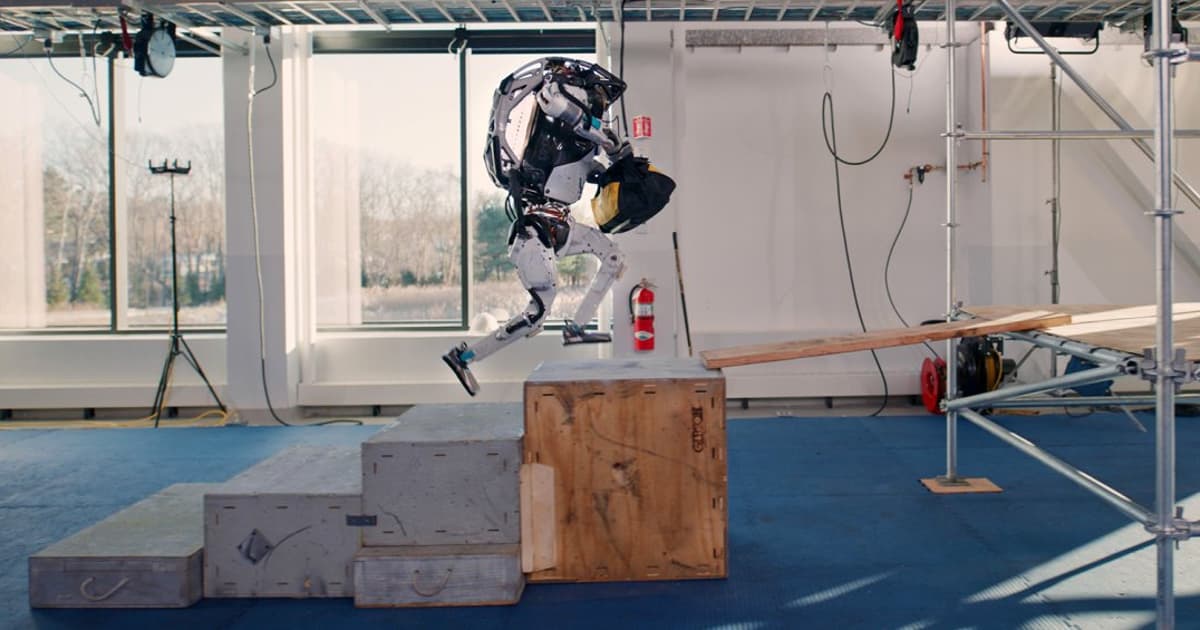
In a video released today, Atlas is given a task: to bring a “coworker” his tools. To complete it, the robot needs to find a heavy plank, pick it up, and use it to bridge a gap in its path. It needs to pick up a heavy tool bag, and balance with it as it runs across the plank and executes a saucy little jump up to a higher level. It then needs to throw the tool bag up onto another level taller than itself, using a jumping, twisting, heaving motion.
And because Boston Dynamics always gives the people what they want, Atlas then pushes a heavy crate down onto the floor and uses it as a platform for a “sick trick” – an inverted 540-degree flip that Atlas engineer Robin Diets says requires “all the strength available in almost every single joint on the robot. That trick is right at the limit of what the robot can do.”
Atlas Gets a Grip | Boston Dynamics
The above video marks another incredible stepping stone for the Atlas team, but it’s the skills behind the performance that are truly fascinating – the engineers constantly have to micro-analyze the nuances of human motion to artificially replicate the kinds of motions that we all do every day without a moment’s thought.
A lot of it is preparation; when we go to pick up or push something heavy, we anticipate its weight and what it’ll do to our balance. So Atlas has to learn to do the same, and to incorporate the weight and proportions of a carried object into its own sense of dynamic balance. The dynamic path-building on display here means Atlas has to quickly and naturally interact with an environment that’s not static – a big perceptual step forward from the static obstacles it dealt with in its parkour phase.
Atlas sees the world through cameras in its head, including a color camera and a depth-sensing time-of-flight camera that it uses to build a 3D map of its environment. And in this test, this visual system needs to work overtime, because while the team has programmed certain information into the robot – like the fact that it’ll need to bridge a gap with a plank, run up some steps, grab a tool bag, jump to the higher level, throw the bag, push the crate and do a sick flip – the robot still has to figure out the locations, shapes and orientations of those objects autonomously.
Take the task of picking up the tool bag. Atlas spots the bag on the floor, and as it’s running over to it, it builds its own internal model of the shape it needs to lift, and plans how its gripper hands will address the object. Where should it grab it? What angle should its hands approach from? How much does it weigh? Where’s the center of mass? How should it prepare its body before trying to lift it? Where should it hold the bag if it wants to run? What about to jump? The team explains further in a behind-the-scenes video:
Inside the Lab: Taking Atlas From Sim to Scaffold
So it’s a pretty major leap, even for a robot that’s well known for major leaps in every sense. But watching both videos, we don’t get the sense that Atlas is anywhere near making a contribution on a real-world construction site. Not because he’s ripping sick 540s off fallen crates, either – which ain’t gonna fly with OSHA, especially if the apprentices start trying to copy him.
It’s the enormity of the challenge that has brought Atlas to the incredible point it’s already at, balanced against the incredibly daunting idea of teaching the robot to recognize, categorize, interact with, ignore, repurpose, avoid and seek out a nearly-infinite number of objects, in a broad range of chaotically fluid real-world environments, based on poorly worded instructions from human bosses. That’s the problem, and for constantly managing to do that kind of thing all day, every day, without really thinking about it too much, we humans can give ourselves a pat on the back.
Boston Dynamics agrees, saying real-world utility is still a long way off. Luckily, under the ownership of Korean megacorporation Hyundai, with its US$220-billion-plus annual revenues, this painstaking, groundbreaking, inspiring and highly entertaining robotics work can continue, and we can continue picking our jaws up off the floor every time this team puts a new video out.
Source: Boston Dynamics
Source of Article
