Robotic versions of flying insects hold a lot of promise for numerous applications, but controlling their yaw axis while in flight has proven challenging. A new bee robot, however, addresses that problem with a clever design.
First of all, just what is the yaw axis? Well, if you picture an airplane with a vertical axis running up and down through its center of gravity, yaw describes the side-to-side horizontal movement of its nose relative to that axis. When you twist back and forth on a pedestal office chair, you’re swiveling on the chair’s yaw axis.
On flapping-wing MAVs (micro air vehicles), movement along this axis has always been difficult to control. As a result, the tiny drones typically end up facing in one direction throughout the entire flight.
Building on previous research, though, Prof. Néstor O. Pérez-Arancibia and colleagues at Washington State University have now created a bee-inspired robot/drone that can “do the twist.”
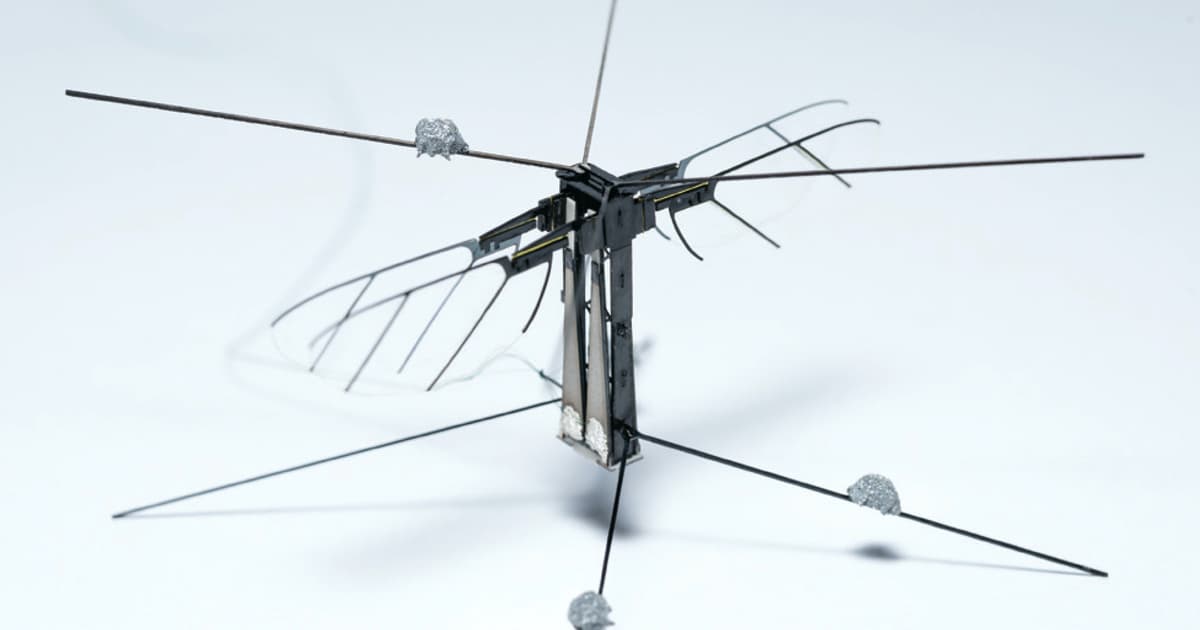
Known as the Bee++, the device features four wings made of carbon fiber and mylar, each of which is operated by a separate actuator. In order to change the MAV’s pitch (nose up or down), the front wings flap at a different rate than the rear wings. And in order to roll it to one side or the other (while still facing straight ahead), the left wings and right wings flap at different rates.
Yawing left or right is achieved by increasing the flapping rate of either the left front and rear right wings, or the right front and the rear left wings – the increase goes from 100 up to 160 flaps per second. Importantly, the front wings are angled in one direction relative to the robot’s body, while the rear wings are angled in the opposite direction.
“By installing two wings at a particular angle, and the other two at the same angle but tilted in the opposite direction, the forces and torques cancel out and the net torque is zero when all four wings are flapping at the same speed,” study co-author Ryan Bena told us. “However, when we want to generate a yaw torque, we just independently change the flapping speed for each wing such that the net torque is no longer zero.”
It is hoped that Bee++-like drones may ultimately find use in applications such as search and rescue scouting in tight spaces, environmental monitoring, or even the artificial pollination of crops. A paper on the research was recently published in the journal IEEE Transactions on Robotics.
Source: Washington State University
Source of Article