Imagine that you’re injured on a remote mountain path but have managed to contact emergency rescue. The first to arrive on the scene could be a small humanoid robot wearing a jetpack if Italian research bears fruit.
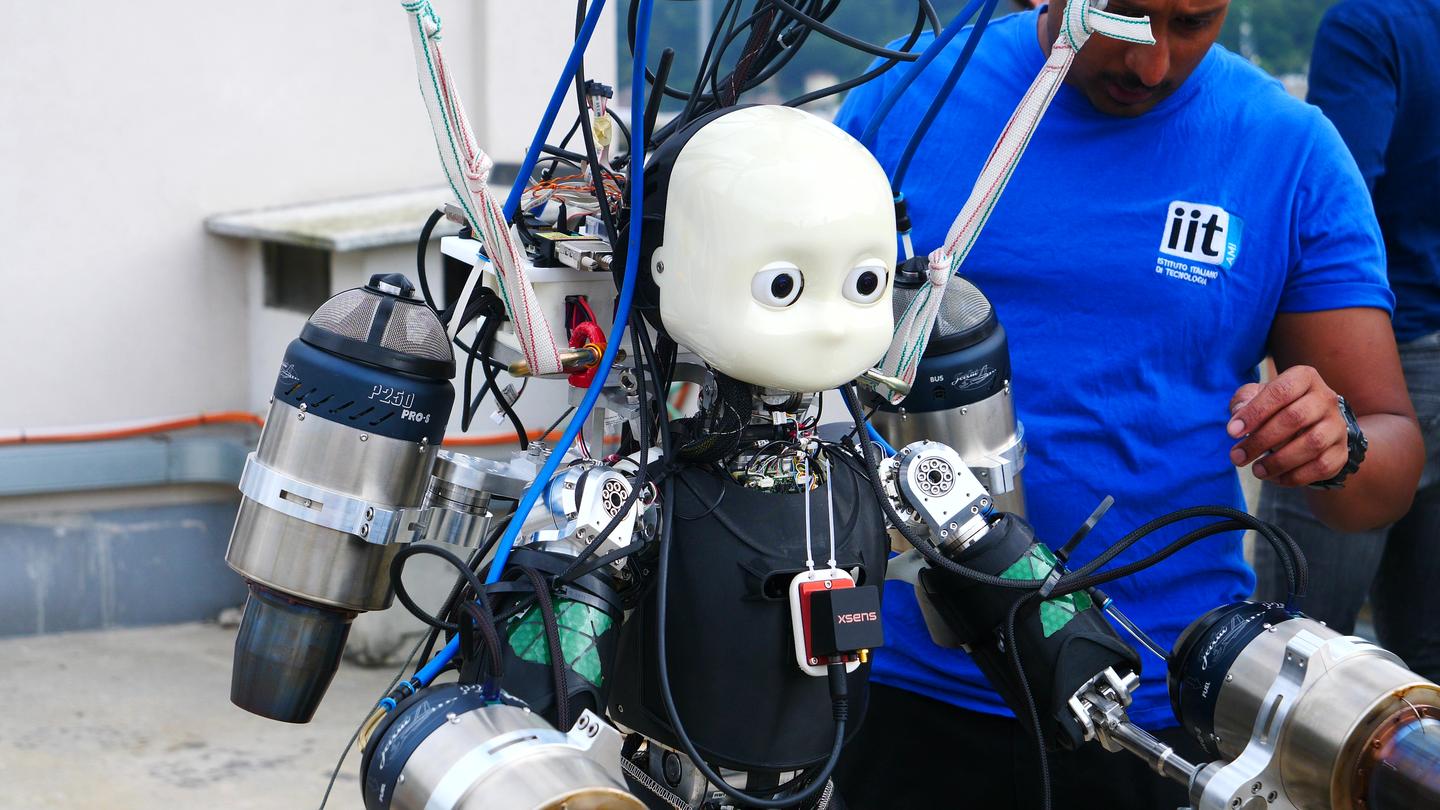
The project from the Artificial and Mechanical Intelligence group at the Italian Institute of Technology (Istituto Italiano di Tecnologia) has taken a child-like biped designed for AI research – the iCub – and aims to get it off the ground using jet power.
As well as strapping a twin-jet pack to its back, the team also sacrificed the original robot’s flexible human-like hands in favor of more fire-breathing JetCats. The researchers say that thrust maxes out at 1,000 N (around 225 lbf) and exhaust temperatures can get as high as 800 °C (1,472 °F).
iRonCub3 sneak peek: experimental area and preliminary validations
The Tony Stark-inspired iRonCub3 has been treated to a newly developed titanium spine to help it cope with the forces at play, and has had heat-resistant covers applied instead of a funky outer suit on an earlier prototype. New electronics have been designed, force-torque sensors installed in the jetpack and components removed to make way for the updated system.
As you can see in the video above, the project is still in the early stages of development, but the team has already tested the jet-powered humanoid in a wind tunnel to validate aero simulations. But even though the jets have been powered up a number of times, the iRonCub3 has yet to actually lift off – however, the team says that it’s confident that hovering will be achieved shortly.
Elsewhere, flight control algorithms have been developed and analyzed, and a trajectory planner has been validated in simulations. The team is currently working on “the estimation of the robot position and orientation in space” using data from its inertial measurement unit and chest-based Real Sense depth camera.
Istituto Italiano di Tecnologia
“The complexity of this research axis much differs from the classical challenges of humanoid robotics,” noted the researchers. “Thermodynamics plays a pivotal role, since turbine emission gas is at about 800 degrees Celsius and at almost the speed of sound; aerodynamics of multi-body systems needs neural networks with physics-informed components to be evaluated online; controller settings need to combine high- and low-bandwidth actuators as joints and turbines; planners are required to generate not only motor dynamics but also turbine trajectories. The experimental validation is as serious as dangerous, so there is little room for improvisations.”
The eventual aim is to have humanoids that can fly to a disaster/emergency site to perform aerial inspections or provide remote personnel with key data. But it will also be able to land and walk around, move over obstacles, climb stairs, open doors and so on. As suggested earlier, this could be useful for first-on-scene rescues but also for inspecting dangerous buildings or infrastructure.
Source: Italian Institute of Technology
Source of Article