Although great advances are occurring in the field of powered prosthetics, the devices typically still require bulky, heavy batteries. Scientists at Rice University are trying to change that, by creating a pneumatic “extra limb” that’s powered by the wearer’s footsteps.
The experimental technology is being developed by a team led by Asst. Prof. Daniel Preston, Mechanical Engineering grad student Rachel Shveda, and postdoctoral associate Anoop Rajappan.
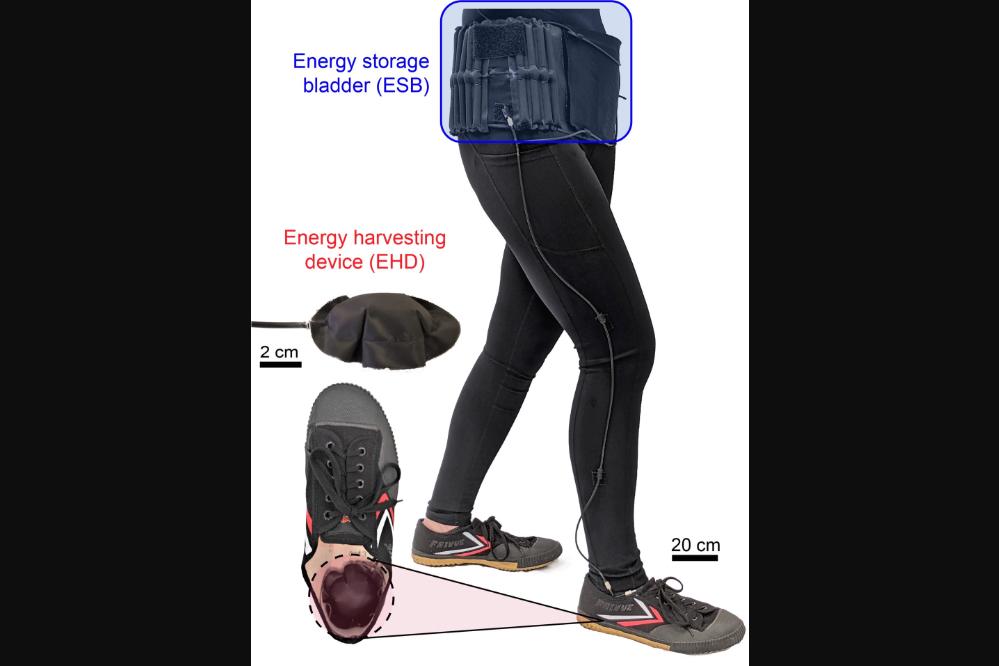
In its current form, the lightweight, inexpensive, machine-washable setup incorporates three main components: a set of open-cell-foam-filled textile pumps worn like insoles inside the wearer’s shoes, an energy storage bladder worn around their waist, and an inflatable textile “arm” that stays curled around one hip when not in use. Air hoses connect the pumps to the bladder, and the bladder to the arm.
Preston Innovation Lab
As the user walks and compresses the pumps with their body weight, those pumps push air up into the bladder, until it’s fully inflated. With the press of a button, the bladder releases some of that air into the arm, causing it to extend out from the body.
Once the arm has been positioned adjacent to an object, another button-press releases some air from it, causing it to curl back in around the object. A silicone rubber coating helps it maintain a grip on the item, allowing the user to carry the object from one location to another. Once the person wishes to release the item, they just release some air back into the arm, causing it to extend back out again.
The team also created another version of the system, in which the bladder releases air into a bellows-like apparatus worn over the armpit beneath one arm. As that bellows inflates and expands, it raises the arm, letting the wearer lift up to 10 lb (4.5 kg) without using any arm-muscle power.
Preston and colleagues are now working on lowering the profile of the system, and on giving it the ability to predict the user’s actions, so not every step of those actions has to be manually activated. It can be seen in use, in the video below.
Walking feeds pressure to pneumatic robots that could help those with disabilities
Source: Rice University
Source of Article