If you were trying to gauge the reaction force of an insect’s leg, you couldn’t just push it with your finger – the size difference between the two would be too great to do so with enough sensitivity. A set of hand-controlled soft robotic microfingers, however, can now get the job done.
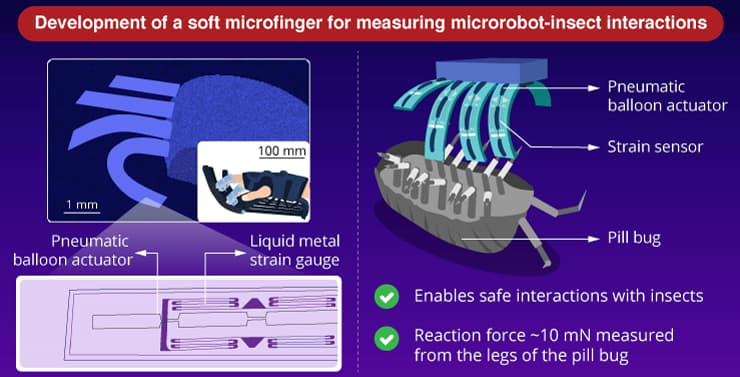
Created by scientists at Japan’s Ritsumeikan University, each of the flat rectangular devices measures just 12 mm long, 3 mm wide and 490 micrometers (millionths of a meter) thick. Five of them are incorporated into one device, which is essentially a robotic hand with soft, flexible fingers. Contained within each finger is a balloon-like pneumatic actuator, along with a liquid metal strain gauge.
The user wears special sensors on their own fingers, which measure the speed, extent and direction of their finger-bending movements. That data is relayed to the corresponding microfinger(s) in real time, causing them to bend accordingly. Should they press up against an object that presses back, the strain gauges measure the force at which that object does so.
Konsihi et al. (2002)/Scientific Reports/DOI: 10.1038/S41598-022-21188-2
In a test of the technology, the microfingers were used to measure the reaction force of the legs of a live pill bug, which was being held upside-down with a suction tool. The measured force was about 10 millinewtons, which fell in line with previously calculated estimates.
It is now hoped that once developed further, the technology could be utilized not only in insect studies, but also in other applications where a small-scale “hands-on” approach is required.
“With our strain-sensing microfinger, we were able to directly measure the pushing motion and force of the legs and torso of a pill bug – something that has been impossible to achieve previously,” said the lead scientist, Prof. Satoshi Konishi. “We anticipate that our results will lead to further technological development for microfinger-insect interactions, leading to human-environment interactions at much smaller scales.”
A paper on the research was recently published in the journal Scientific Reports.
Source: Ritsumeikan University
Source of Article