Scientists have created a four-legged bio-inspired robot that climbs like no other. It clings to rough vertical surfaces utilizing a unique mechanism that is highly effective, yet at the same time relatively simple.
While some experimental robots utilize suction-based grasping systems to climb smooth surfaces, such technology doesn’t work on rough surfaces like rock, where a seal can’t be formed.
One alternative involves using what are known as microspine grippers. These incorporate an array of tiny sharp hooks that snag small nooks and crannies in the surface being climbed. The hooks are released from that surface when the gripper is lifted off to take the next step up.
Some microspine grippers are passive, relying on the weight of the robot’s hanging body to maintain a hold. This type works OK on relatively flat walls but struggles with more irregular surfaces such as cliff faces, which require a more varied climbing strategy.
Active microspine grippers get around this limitation by incorporating electric actuators that purposefully sink a ring of the hooks into the surface, maintaining a motorized hold that works in any direction. These tend to be bulky, energy-hungry and mechanically complex, however, plus they make for a fairly slow climbing speed.
That’s where the LORIS quadruped robot comes in.
Carnegie Mellon University
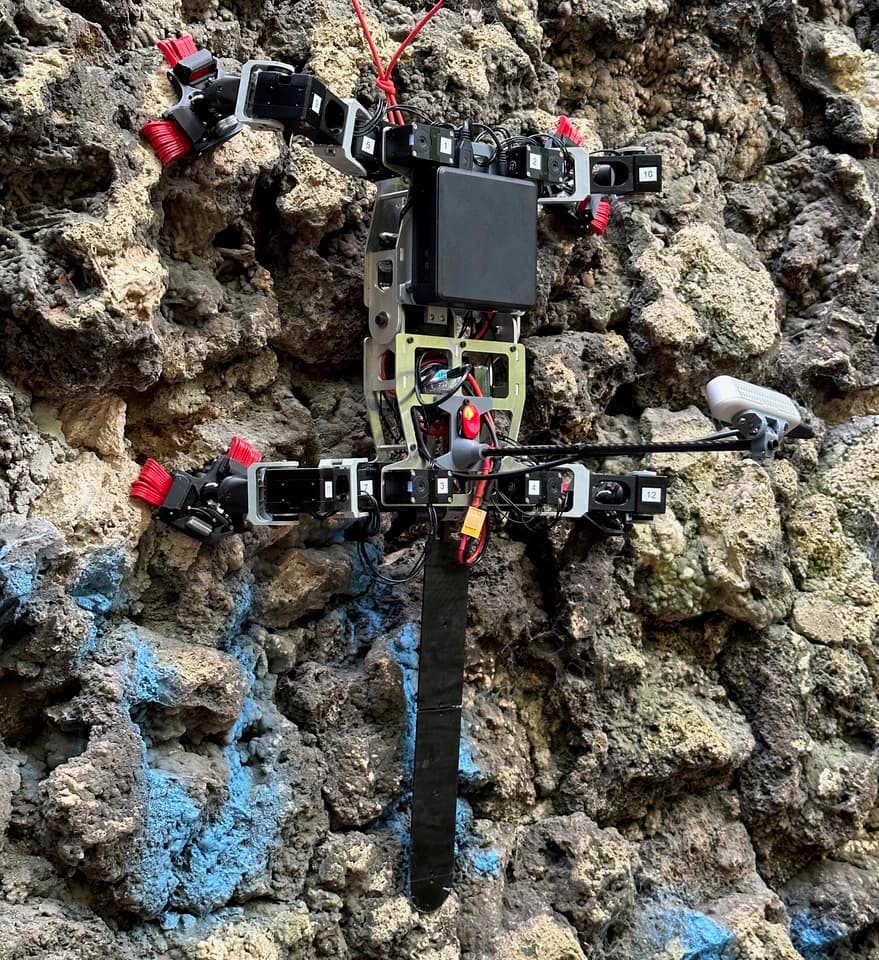
Named for a climbing marsupial – and also for the words “Lightweight Observation Robot for Irregular Slopes” – the device was created by Paul Nadan, Spencer Backus, Aaron M. Johnson and colleagues at Carnegie Mellon University’s Robomechanics Lab.
At the end of each of the bot’s four legs is a splayed microspine gripper, incorporating two groups of spines arranged at a right angle to one another. The gripper is connected to the leg by a passive wrist joint. This basically means that the gripper just flops around in response to whatever the leg is doing.

Carnegie Mellon University
Utilizing an onboard depth-sensing camera and microprocessor, the robot strategically advances its legs in such a manner that when the gripper on one leg takes hold of the climbing surface, the gripper on an opposing leg – on the other side of the body, at the other end of the body – also does so.
As long as those two diagonally opposed legs maintain inward tension on their grippers, those grippers stay firmly attached to the surface. The robot’s other two opposing legs, meanwhile, are free to take the next step upward. This is an insect-inspired climbing strategy known as directed inward grasping (DIG).
According to the researchers, LORIS combines the light weight, speed, energy efficiency and simplicity of passive microspine grippers with the firm hold and adaptability of active grippers. And as an added bonus, the robot is designed to be easy and inexpensive to manufacture.
You can see LORIS in action, in the video below. A paper on the study was recently presented at the International Conference on Robotics and Automation.
LORIS: A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
Source: Carnegie Mellon University
Source of Article