In order to keep from accidentally hurting their human coworkers, many industrial robots have sensors that detect physical contact with people or other objects. Scientists have now devised a high-tech sweater which brings this functionality to robots that don’t have it already.
Known as RobotSweater, the technology is being developed by a Carnegie Mellon University team led by assistant professors James McCann and Changliu Liu. The “garment” – which is wrapped around a robotic arm or other device, and connected to a power source – is made up of three stacked layers of material.
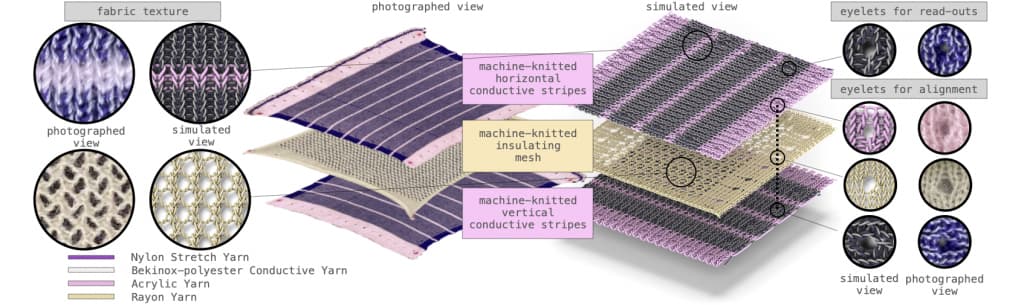
The top and bottom layers consist of regular nylon yarn, with spaced stripes of a metallic-fiber conductive yarn running through them. Those stripes are arranged in rows on one layer and in columns on the other, so they combine to form a grid when viewed from above. Sandwiched between those two layers is an insulating layer of non-conductive mesh.
Carnegie Mellon University
As long as no external pressure is applied to the RobotSweater, the two conductive-stripe layers are separated from one another. When pressure is applied, however, some of the stripes on those layers connect with one another through the holes in the mesh layer.
This closes a circuit, producing an electrical signal. By analyzing where that signal originated within the conductive-stripe grid, it’s possible to determine where pressure is being applied on the robot’s sweater-clad body.
In a real-world scenario, the robot could then react by immediately ceasing movement. The technology might also allow people to train robots to perform certain actions by touching them and physically guiding them. Additionally, the researchers are now exploring the possibility of using finger-swipe and pinch commands on the sweater, as if it were a touchscreen.
And as an added bonus, because the RobotSweater is made of soft and flexible material, it can be applied over awkwardly shaped or moving parts of robots that can’t accommodate conventional rigid sensors.
There’s more information in the following video.
Robot Sweater : Fabric Tactile Sensor “Skin”
Source: Carnegie Mellon University
Source of Article