Remember those toys that sprang up into the air after you pushed them down? They’re called poppers, and they’ve inspired an actuator that could one day allow soft-bodied robots to jump across rough terrain.
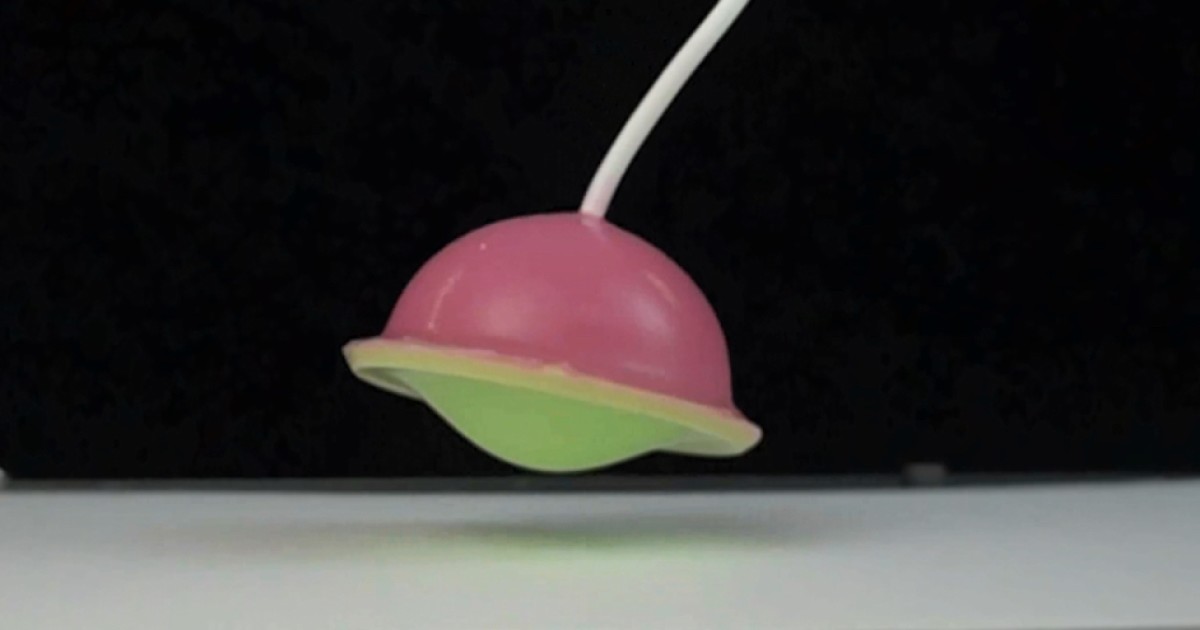
Being developed at Harvard University, the actuator consists of two upside-down-bowl-shaped polymer caps. The larger of the two sits on top, with the smaller one nestled inside of it. There’s a small air gap between the two, plus they’re joined together at the bottom (along the “rims” of the “bowls”).
When not needed, the actuator just sits flat against the ground. However, once a jump is required, an integrated hose is used to pump air into the gap between the two caps. The resulting buildup of pressure causes the top, larger cap to expand upward.
At the same time, though, the smaller, bottom cap buckles and expands downward, rapidly releasing energy as it goes from a concave to convex shape. This process is known as shell buckling, and it causes the cap to forcibly hit the ground, catapulting the whole actuator into the air.
Once the jump is complete, the air pressure is released, and the cap pops back into the actuator again. In this way, a robot equipped with such a device could jump repeatedly.
“This actuator is a building block that could be integrated into a fully soft robotic system to give soft robots that can already crawl, walk and swim the ability to jump,” says Prof. Katia Bertoldi, senior author of a paper on the research. “By incorporating our jumper into these designs, these robots could navigate safely through uncharted landscapes.”
The paper was recently published in the journal Science Robotics.
You can see the actuator in action, in the following video.
Source: Harvard John A. Paulson School of Engineering and Applied Sciences
Hopper Repeat Jump
Source of Article