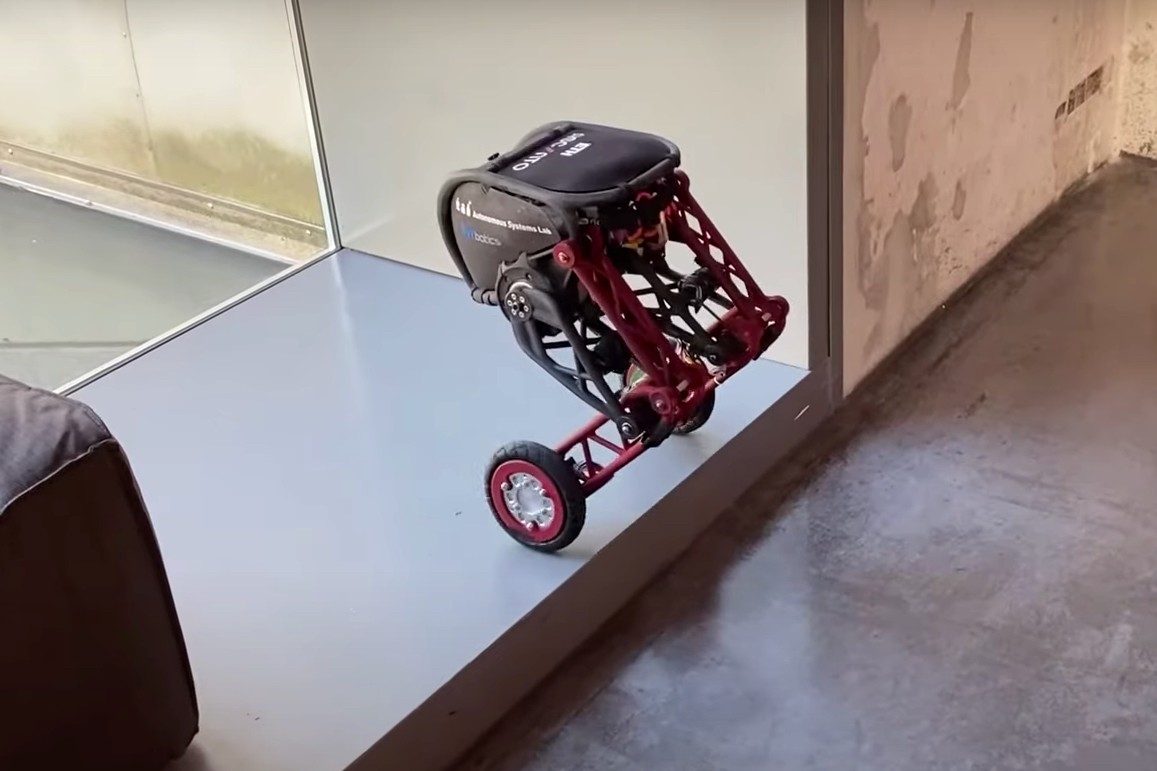
While legged robots are able to perform feats such as climbing stairs, their wheeled counterparts are faster and less complex. The Ascento robot offers the best of both worlds, as it has two jumping legs – each one with a wheel on the bottom.
Developed by a team of engineering students at Switzerland’s ETH Zurich research institute, Ascento is now in its second incarnation, called Ascento 2. The first version was unveiled last year.
When cruising along level floors, the self-balancing robot utilizes its two hub-motor-powered wheels. Once it encounters a vertical obstacle such as a set of stairs, however, it crouches down to preload its spring-equipped legs, then jumps up and forward. In this fashion, it’s able to ascend the stairs, one by one.
ETH Zurich
Along with giving it the ability to jump, though, Ascento’s legs also allow it to stay upright on uneven terrain. They do so by bending at their linkage points independently of one another, keeping the robot’s main body level at all times. With the latest version’s new-and-improved “brain,” this leg-bending feature additionally lets the robot keep from falling over when struck from the side.
And while Ascento can be remotely controlled, it is able to operate autonomously, utilizing cameras and other sensors to both navigate and 3D-map its surroundings.
Specs-wise, it tips the scales at 10.4 kg (22.9 lb), has a top wheel-rolling speed of 8 km/h (5 mph), a maximum jumping height of 0.4 m (1.3 ft), and can run for approximately 1.5 hours on one charge of its battery pack.
Ascento 2 was unveiled this week, via the online ICRA 2020 robotics conference. The robot can be seen in jumping and rolling action, in the following video.
Source: ETH Zurich
This is Ascento 2
Source of Article

