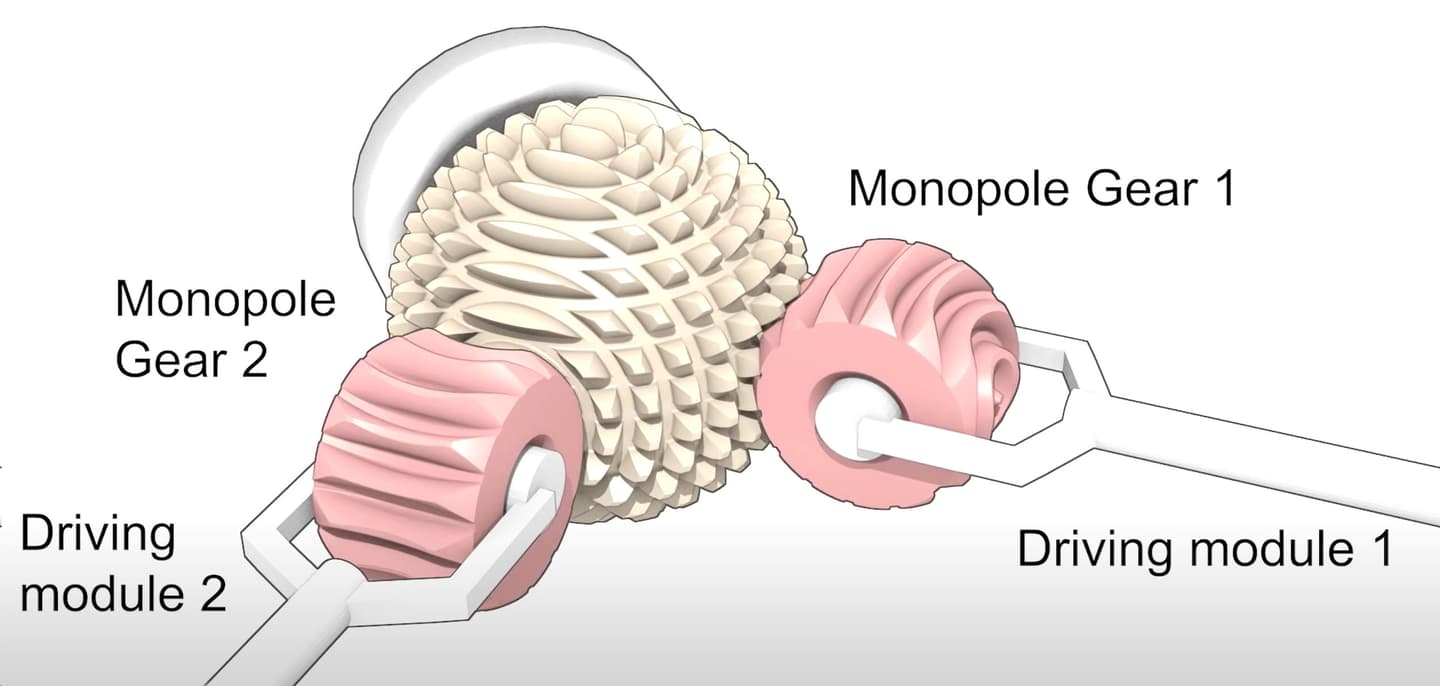
At its core, this system developed at Yamagata University in Japan uses a “simple” cross-spherical gear paired with a monopole gear to control pitch, roll, and yaw. Essentially, the same full range of movement you’d see in a rotator cuff (the shoulder) of a human. With clever gearing, coupling, and sliding motions, the ABENICS gear is extremely precise in its movements.
By adding a second monopole gear and differentials in tandem, connected to a ball joint, this system becomes even more robust. Operators are able to achieve very precise, high-torque movement on the spherical gear with incredible accuracy.
If attached with an output link – like an arm or a leg – this means finite control over a very realistic joint in robotics for smooth and natural movement. Generally in today’s humanoid robots, two or more motorized joints are used in tandem for a shoulder: one to control up and down, one for forward and backward motion, and a third to control rotation.
ABENICS – Active Ball Joint Mechanism With Three-DoF Based on Spherical Gear Meshings, as it’s officially called – could simplify these joint structures, combining a full range of motion into a single joint.
Yamagata University
This type of gear hasn’t been widely adopted in any commercial, medical or industrial ventures as of yet. Although its focus has been mostly in academia and research, the technology shows very high promise for future use in areas where high torque, high precision, and three-dimensional freedom of movement are needed.
The implications of what robots equipped with ABENICS joints could do are boundless. Surgeons could perform delicate, minimally invasive laparoscopic surgeries with absolute accuracy, precision and control. Or you could make a trip to the dentist with confidence that you were in “good hands” for a regular cleaning.
Yamagata University
Rover landers and spacecraft alike could be fitted with highly dexterous arms to grab, hook, or even assemble human habitats on the moon, or make repairs to the International Space Station (at least until SpaceX crashes the ISS into Earth). Imagine a lunar lander similar to a spider excavator fitted with ABENICS joints.
The possibilities seem endless, and watching it in motion is fascinating – if not slightly mind-boggling.
And just think of how many more stuffed animals we could win in the Claw Machine game at the arcade.
【Full HD】ABENICS: Active Ball Joint Mechanism With Three-DoF Based on Spherical Gear Meshings
Source: IEEEXplore
Source of Article