This cute, one-legged hopping robot out of UC Berkeley’s Biomimetics lab has been capable of doing sweet parkour-style double-jumps off walls since 2016. By 2018, it was hopping continuously to heights up to a meter (3.3 ft) or so, with pretty decent accuracy, and autonomously bouncing its way up obstacles, using chairs as stepping stones to bounce up onto a table, for example.
What it couldn’t do, oddly enough, was land. It’s one thing to keep a jigger like this dynamically in motion, but things need to be incredibly precise to stick the landing, especially when you don’t have a second leg to step forward or back if you land at the wrong angle.
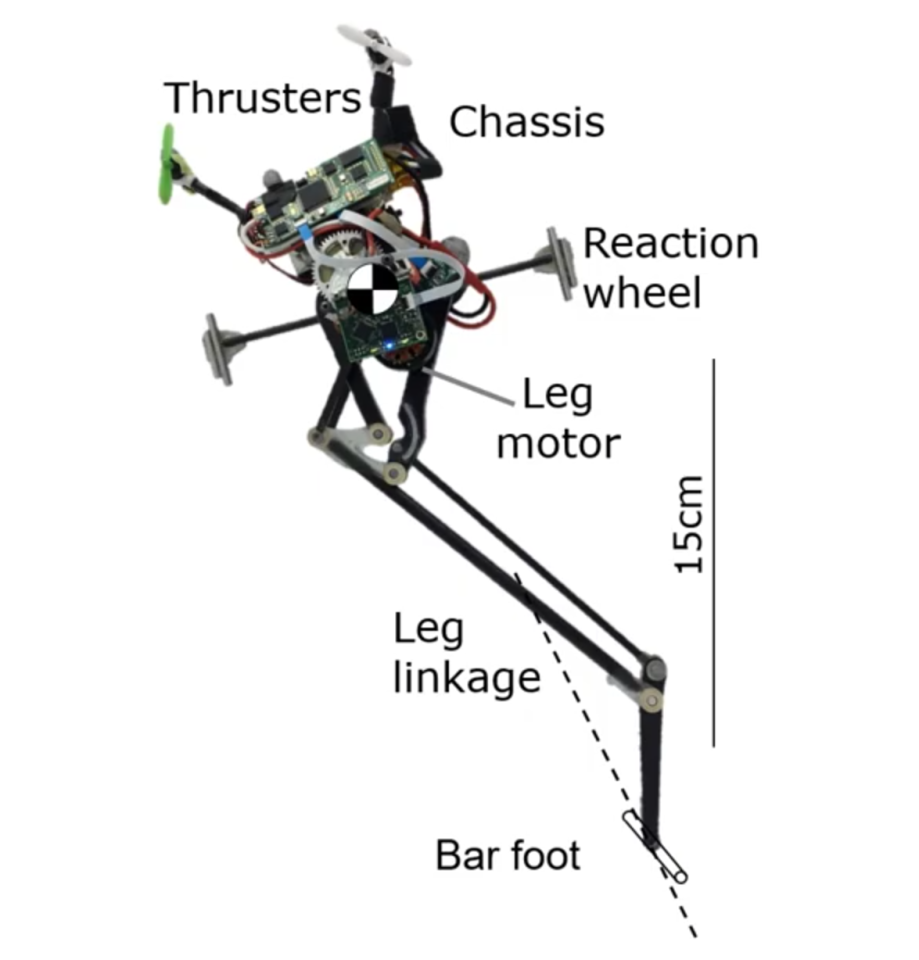
Indeed, angular momentum is the biggest bugbear for Salto to deal with, particularly when hopping forward from one spot to another. It leans forward as it jumps, using a rotating reaction wheel to balance, then adjusts the rotation of that balance wheel to bring its foot forward to the appropriate angle for a controlled landing. If its angular momentum is off, it might land its foot right on the target but then fall over.
UC Berkeley
Salto team lead Justin Yim explained the solution in an interview with IEEE Spectrum. “Falling from 1 meter (3 ft), Salto only has about 2.3 degrees of wiggle room forwards and backwards if it is to stick its landing. Gymnasts ‘sticking a landing’ with feet together face this same challenge. If their angular momentum is wrong, they have to take a step to keep their balance. However, taking a step isn’t possible with only one leg (as Salto has) or when landing on a narrow ledge or beam. A person landing on a beam or ledge will pinwheel their arms the same way Salto spins its reaction wheel tail.”
In a test of 60 jumps, the robot made a perfectly controlled landing 52 times, sat back on its “heel” five times, and fell over just three.
Controlling the landing has hugely boosted Salto’s jumping accuracy. Where previously it might land anywhere within the radius of a dinner plate or so, it can now reliably precision-hop and be expected to land somewhere in the radius of a small coin.
This kind of precision could help Salto fulfill its original goal: navigating difficult terrain in search and rescue missions, where these little bots could hop their way around rubble, rocks and wreckage faster and more safely than human teams.
Check out a short video below, or if you’d like to get into the maths of how Salto does its thing, there’s a longer video available as well.
Salto-1P Leaping and Landing
Source: UC Berkeley Biomimetic Millisystems via IEEE Spectrum
Source of Article